新しい研究室紹介、研究動画紹介のページはこちらです。
知的システム計画学
西竜志 教授
佐藤治夫 准教授
劉子昂 助教
研究室のホームページはこちらをご覧ください
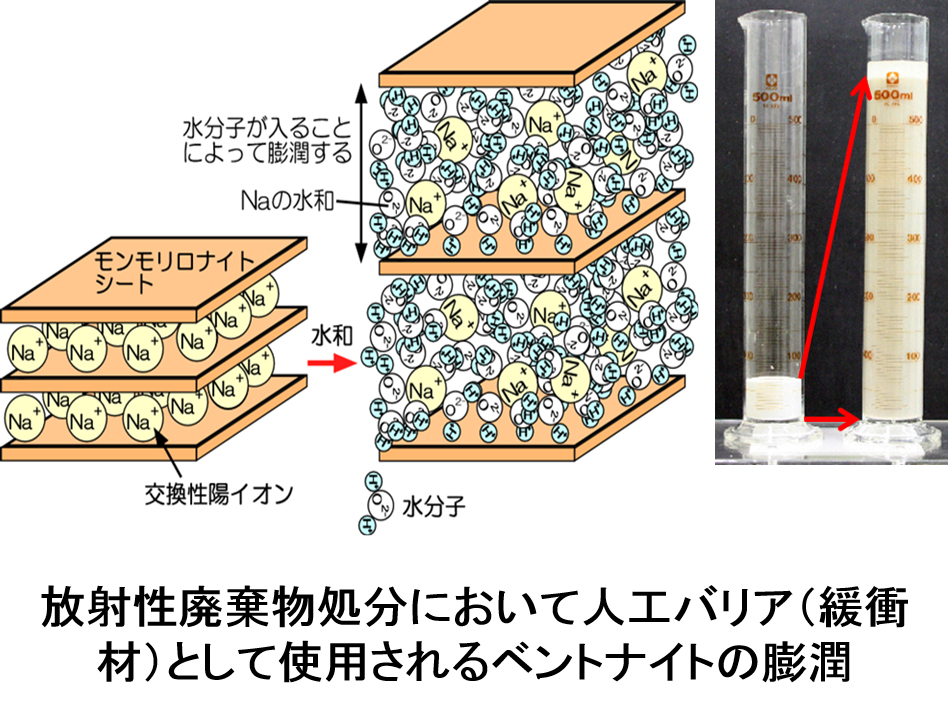
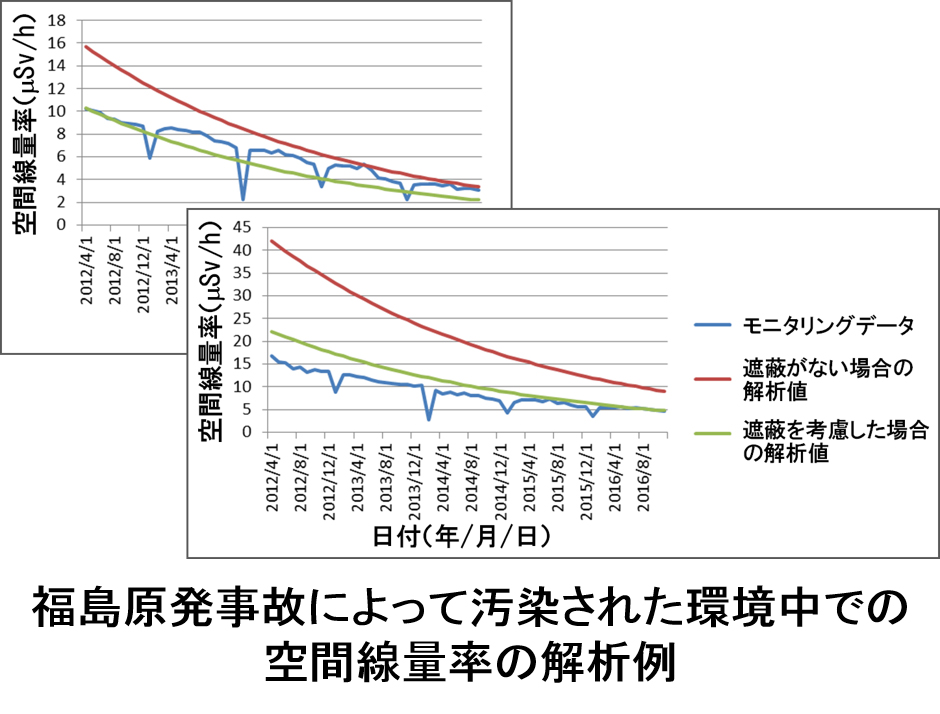
高度情報化社会における知的システムの構築をめざして,サプライチェーンマネジメント, スケジューリング,システム最適化, ロボティクスなどの知的システム計画に関する基礎理論と工学応用とともに,新しいモデリング技法,最適化アルゴリズム,人工知能を用いた大規模システムのモデル化, 解析, 診断, 安全かつ最適なシステムの管理運用の研究を行っています。また, 放射性廃棄物処分における工学技術や安全評価技術の高度化,原発事故により汚染された環境中での放射性物質の挙動などの環境動態,放射線の遮蔽や線量解析などの放射線安全,及びそれらの設計・解析評価システムに関する研究も行っています。

適応学習システム制御学
松野隆幸 教授
戸田雄一郎 准教授
研究室のホームページはこちらをご覧ください
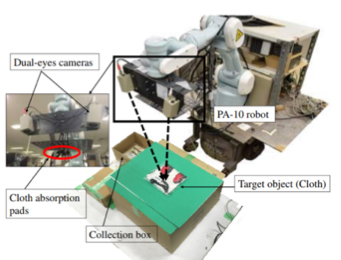
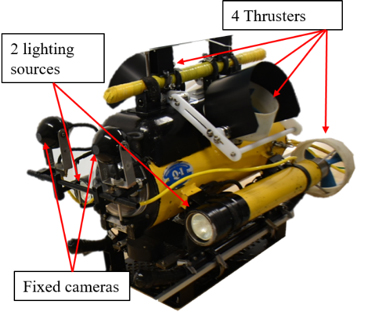
人間や動物が何かを追いかけるときには、対象となるものを見失わないようにするため、まず目が動き、つぎに追いかけようとして体が動きます。この一連の動作は生物の知能的行動に基づいたもので、これを応用すれば、様々な環境で適応的に行動するロボットも夢ではありません。私たちの研究室では、人間の知能的な振る舞いをロボットシステムに取り入れることを目指して、ビジュアルサーボを中心技術とし水中ロボットをはじめとした様々な知能ロボットに関する研究に取り組んでいます。
知能システム組織学
村田厚生 教授
研究室のホームページはこちらをご覧ください
人間が複雑な機械システムを安全に操ったり、社会システムを円滑に運営したりするためには、システムの破綻につながるような重大なミスを予防することが大切です。当研究室では、自動車の操縦、コンピュータやリモコン、ペンなどの機器や道具の操作、ネットオークションなどの経済活動を行っているときの人間の行動を調べ、安全なシステムの設計に生かす研究を行っています。


生産知能学
有薗育生 教授
柳川佳也 准教授
Lee Jieun 助教
研究室のホームページはこちらをご覧ください
(ただいま準備中)
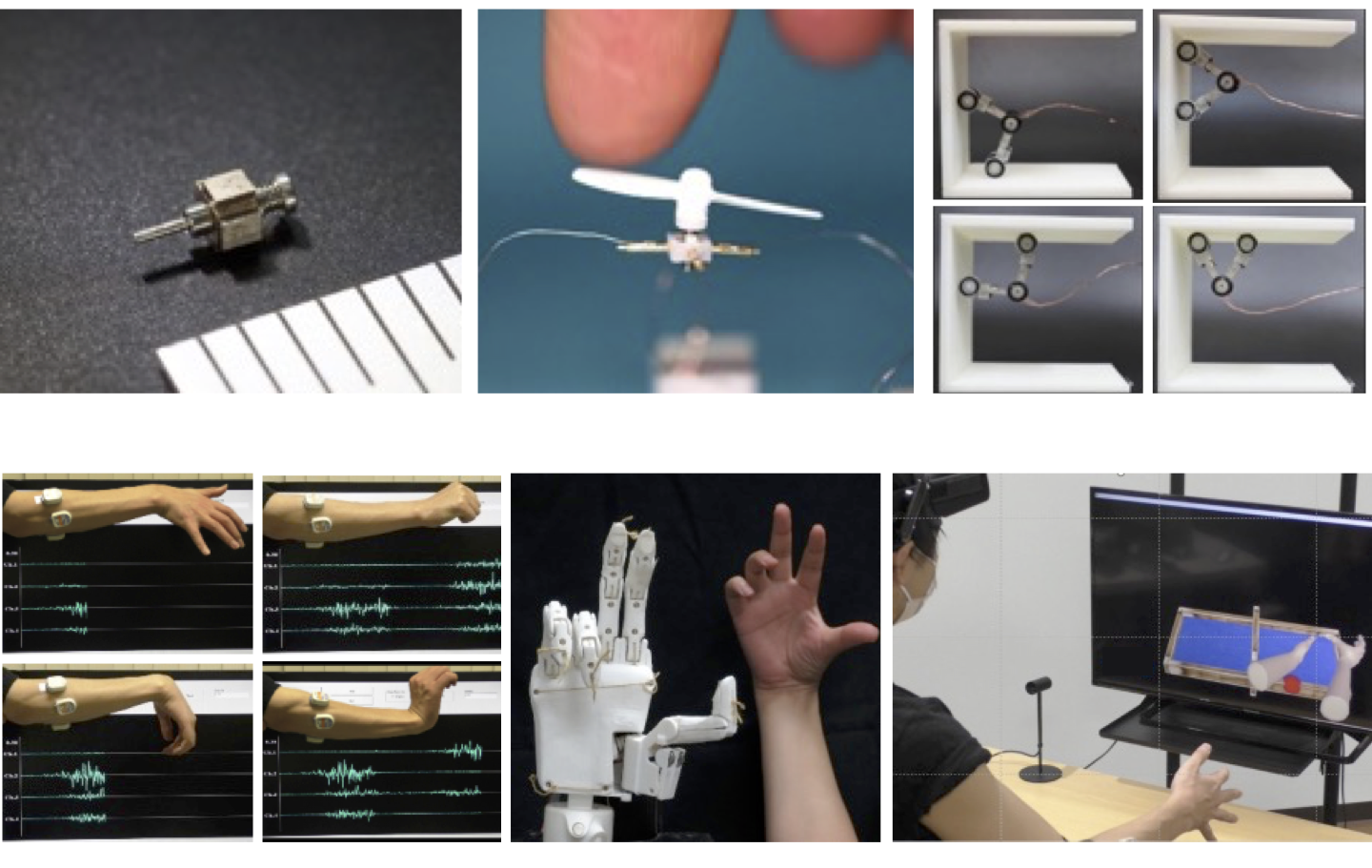
メカトロニクスシステム学研究室では、新しいセンサやアクチュエータの創造的かつ基礎的な研究開発、それらの技術を用いたロボットや医療機器などの応用的な研究開発、さらにはそれらの周辺技術の研究開発に取り組んでいます。特に、圧電効果を駆動原理とするセンサ・アクチュエータに着目し、駆動理論などの基礎的研究から、新デバイスの設計開発評価、さらにはそれらを応用したロボットの制御などの応用的研究までを研究の範囲としています。

知能機械制御学
平田健太郎 教授
中村幸紀 講師
池崎太一 助教
研究室のホームページはこちらをご覧ください
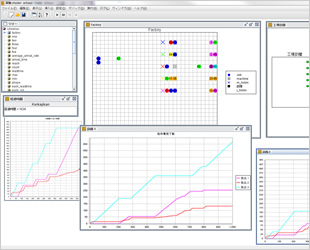
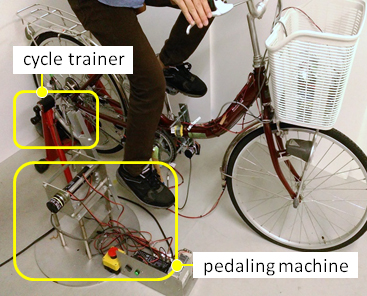
システム制御理論は社会を支える基盤技術です。その対象分野は機械系にとどまらず、電気/情報/化学系など多岐に渡ります。私たちの研究室では、産業機器やメカトロニクス機器の温度・振動制御、自律移動ロボット群のフォーメーション制御(下図左側)、通信制約を有するネットワーク化制御などの研究を行っています。さらに、電動自転車のパワーアシスト制御(下図右側)、高齢者の抱え上げ動作の軌道生成など、対象を人にまで広げた人間-機械系に関するテーマにも取り組んでいます。社会のニーズに応え、日常生活をより快適にする制御工学、制御技術の確立を目指しています。

システム構成学
神田岳文 教授
脇元修一 准教授
山口大介 助教
研究室のホームページはこちらをご覧ください
医療や科学計測の現場で使われる装置を動かすアクチュエータ(モータなど)に関する教育研究活動を行っています。医療機器や福祉機器のためのやわらかい機械やマイクロマシン、小型の化学反応装置であるマイクロリアクタ、低温・高温・磁場といった特殊な環境を使う測定装置の中で動くアクチュエータなどを実現するために、新しい技術に関する研究に取り組み実用化を目指しています。

機械インターフェイス学
中澤篤志 教授
亀川哲志 准教授
下岡綜 助教
研究室のホームページはこちらをご覧ください
発電所や化学コンビナートといった大きな装置を運転したり、ロボットを操作するのはそう簡単ではありません。運転や操作する人がなるべく簡単に操作できるように、また間違った運転や操作をしないように運転員や操作員を支援する方法を研究しています。また、人の代わりに建物の中に入って中の様子を探るレスキューロボットや、生物をまねたヘビ型ロボットや4足歩行ロボット、球体を回転させるモータ、ジャンプするロボットなどの研究などの研究、医療を支援するシステムの開発なども行っています。

メカトロニクスシステム学
真下智昭 教授
芝軒太郎 准教授
永井伊作 助教
研究室のホームページはこちらをご覧ください
日常の生活環境で人間と共存することができ、かつ、生活を多面的に支援できるロボットシステムの実現を目指して、メカトロニクスシステムに関する教育と研究を行っています。例えば、4つのロータあるいはスラスタを用いて空中や水中を移動するロボット、一般的な車輪を用いて人や物を全方向へ持ち運ぶシステム、センサを用いて路面や自身の運動を測定し自分の位置を推定する方法、立ち乗り型パーソナルモビリティなどの研究・開発を行っています。