
自律型水中ロボの自動充電実用化へ前進 複眼カメラによる空間立体認識で、水中の嵌合(かんごう)穴へのドッキングに成功
2016年11月18日
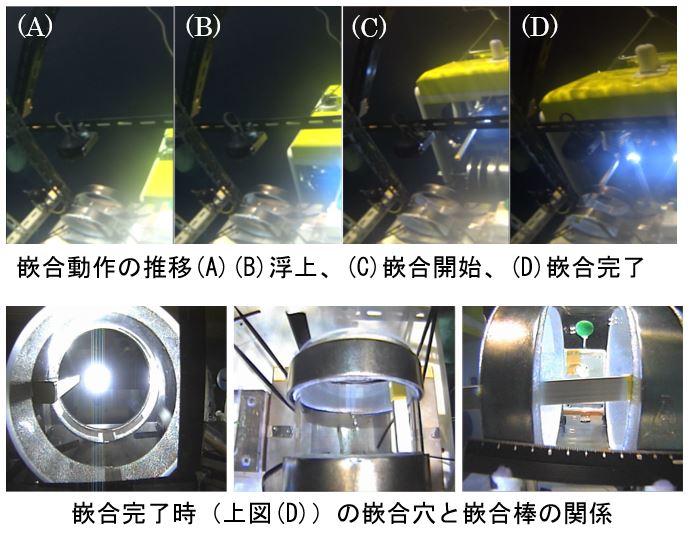
岡山大学大学院自然科学研究科(工)の見浪護教授と松野隆幸講師の研究グループは、九州工業大学、東京大学の協力を得て、自律型水中ロボットAUV(Autonomous Underwater Vehicle)の水中嵌合実験に成功しました。
本学が開発した実時間複眼3次元立体認識(3D-MoS: 3Dimension Move on Sensing)を九工大所有の自律型水中ロボットAUV「ツナサンド2」に搭載し、東京大の実験水槽を用いて実験を行いました。
AUVの自動嵌合はロボットのエネルギー源であるバッテリーの海底での自動充電につながり、深海底での自律型知能ロボットの長時間の自律連続運転や作業を行うことが可能になります。本技術は、長期間連続航行を要する海底資源探査・回収や海中未確認生物の生態調査等への利用が期待されます。
本学が開発した実時間複眼3次元立体認識(3D-MoS: 3Dimension Move on Sensing)を九工大所有の自律型水中ロボットAUV「ツナサンド2」に搭載し、東京大の実験水槽を用いて実験を行いました。
AUVの自動嵌合はロボットのエネルギー源であるバッテリーの海底での自動充電につながり、深海底での自律型知能ロボットの長時間の自律連続運転や作業を行うことが可能になります。本技術は、長期間連続航行を要する海底資源探査・回収や海中未確認生物の生態調査等への利用が期待されます。
<詳しい研究内容について>
自律型水中ロボの自動充電実用化へ前進 複眼カメラによる空間立体認識で、水中の嵌合穴へのドッキングに成功
<お問い合わせ>
岡山大学大学院自然科学研究科(工)
教授 見浪 護
(電話番号)086-251-8233
(HP)http://www.suri.sys.okayama-u.ac.jp