
長時間潜航/作業対応自律制御型水中ロボットMOS/AUV(ももたろう岡大1号)の開発に成功
2014年08月06日
岡山大学大学院自然科学研究科の見浪護教授の研究グループは、広和株式会社(廣安雅美社長)の協力を得て、「長時間潜航/作業対応自律制御型水中ロボットMOS/AUV(ももたろう岡大1号)」の開発に成功しました。
本ロボットは、本学が開発したロボット制御知能MOS(Move on Sensing)を搭載。自動給電による長時間の自律化連続運転/作業が行えることから、長期間連続航行を要する海底資源探査・回収や海中未確認生物の生態調査等のほか、高級魚等海産物の栽培漁業・中間育成や機雷掃海、人命救助(ライフセーバー)等への利用が期待されます。
<業 績>本ロボットは、本学が開発したロボット制御知能MOS(Move on Sensing)を搭載。自動給電による長時間の自律化連続運転/作業が行えることから、長期間連続航行を要する海底資源探査・回収や海中未確認生物の生態調査等のほか、高級魚等海産物の栽培漁業・中間育成や機雷掃海、人命救助(ライフセーバー)等への利用が期待されます。
岡山大学大学院自然科学研究科の見浪護教授の研究グループは、水中メーカー広和株式会社(廣安雅美社長)の協力を得て、従来型の遠隔操作型水中ロボットROV(Remotely Operated Vehicle)にカメラを複眼構成としたMOS制御知能を搭載した長時間潜航/作業対応自律制御型水中ロボットの開発に成功しました。
長時間潜航/作業対応自律制御型水中ロボットは、
① 水中対象物の3次元位置・姿勢自動認識性能
② 固定型水中対象物に対する位置安定化制御性能
③ 移動対象物の追尾制御性能
を持ち、自律制御AUV(Autonomous Underwater Vehicle)化を実現。深海における長時間潜航/作業が可能となりました。
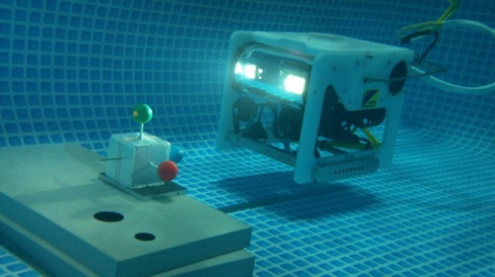 MOS/AUV海底自動給電検証実験
MOS/AUV海底自動給電検証実験<背 景>
現在、深海用水中ロボットには水中汚染物(放射能汚染物等含む)の発見・回収、深海底地形調査・資源回収、機雷撤去、水産資源育成・捕獲、海難事故対応等さまざまなニーズ側からの期待が集中しています。しかしながら、従来の2,000m級深度の水中ロボットでは、深海における①長時間連続航行②高精度な自律的作業③故障・本体喪失という課題がありました。一方、ロボット制御技術においては、主に視覚情報に頼ったVisual Servoing技術により地上作業用ロボットの実用化が進んでいますが、対象物の3次元空間(3D)高精度認識や環境変化に応じた自律的対応(環境対応型)は進んでいないなどの課題がありました。
見浪教授らの研究グループは、カメラを複眼構成としたVisual Servoing技術をベースに①多機能センシング(形状、色調、温度、放射線等)によるロボット内部での静・動的不定形対象物の自動構築・認識②認識対象物への自立的働きかけ③対象物への働きかけ後の環境変化に対応するための新しいロボット制御知能MOSを開発しました。
<見込まれる成果>
本ロボットは、自動給電による長時間の自律化連続運転/作業が行えることから、
(ア) 水中放射能汚染物の回収
(イ) 深海底資源探査・回収(サンプリング等も)
(ウ) (深海)水中未確認生物の発見・回収ならびに生態観察
(エ) 地球構造観察(海底地殻変動等)
(オ) 水産(栽培漁業・中間育成)
(カ) 機雷撤去
(キ) 人命救助(MOS/AUVライフセーバー)
などへの利用が期待されます。
また、本学と株式会社石垣が共同開発したMOS制御知能搭載型の放射能汚染土壌の低被ばく・減容化ロボットシステムが「環境省平成26年度除染技術実証事業」に採択され、実用化段階を迎えています。本学が開発したMOS制御知能は、宇宙開発(宇宙ゴミ回収、月面基地構築)や交通機関、農業、セキュリティ分野など広範囲な応用展開が期待されます。
<補足>
放射能汚染土壌を除染する完全自動ロボットシステムを開発(平成26年7月3日プレスリリース)
報道発表資料はこちらをご覧ください
<お問い合わせ>
岡山大学大学院自然科学研究科、産業創成工学専攻
知能機械システム学講座 教授 見浪 護
(電話番号)086-251-8233
(FAX番号)086-251-8233
(ホームページ)http://www.suri.sys.okayama-u.ac.jp/
広和株式会社 マリンシステム部 藤本 勝樹
大阪市此花区西九条1-3-31
(電話番号)06-6462-7152
(FAX番号)06-6468-3298