
複雑な配管内の情報を正確な地図として自動生成するヘビ型ロボットを開発 ―ImPACTタフ・ロボティクス・チャレンジによる タフなヘビ型ロボットの開発―
2017年08月29日
内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:東北大学大学院情報科学研究科 田所 諭(たどころ さとし)教授)における研究開発課題「タフな索状ロボットおよび極限ヒューマンインタフェースのための極限制御システムの開発」(研究開発課題責任者:京都大学大学院工学研究科 松野 文俊(まつの ふみとし)教授)において、松野 文俊教授、早稲田大学理工学術院創造理工学研究科 奥乃 博(おくの ひろし)教授、岡山大学大学院自然科学研究科 亀川 哲志(かめがわ てつし)講師、金沢大学理工研究域機械工学系 鈴木 陽介(すずき ようすけ)助教らは、プラント設備の配管内の日常点検や緊急時の点検を目的としたヘビ型ロボット(図1、2)を開発し、複雑な配管内を走破し、配管内の状況を正確に提供することに成功しました。
<研究開発成果のポイント>○ヘビ型ロボットに皮膚型触覚センサである全周圧力センサを搭載し、曲管を含む複雑な配管内の走破を実現(図3)。 ○音響センサによる配管内距離情報、慣性センサからの進行方向情報、多関節モデルによる姿勢推定情報を組み合わせて、精度良くロボットの位置を推定し、同時に配管のマップを作成できる技術(統合型SLAM)を開発。○先端カメラによる画像、全周圧力センサの接触情報、統合型SLAMとの統合による収集情報の可視化を行う点検用情報表示を高度化(図4)。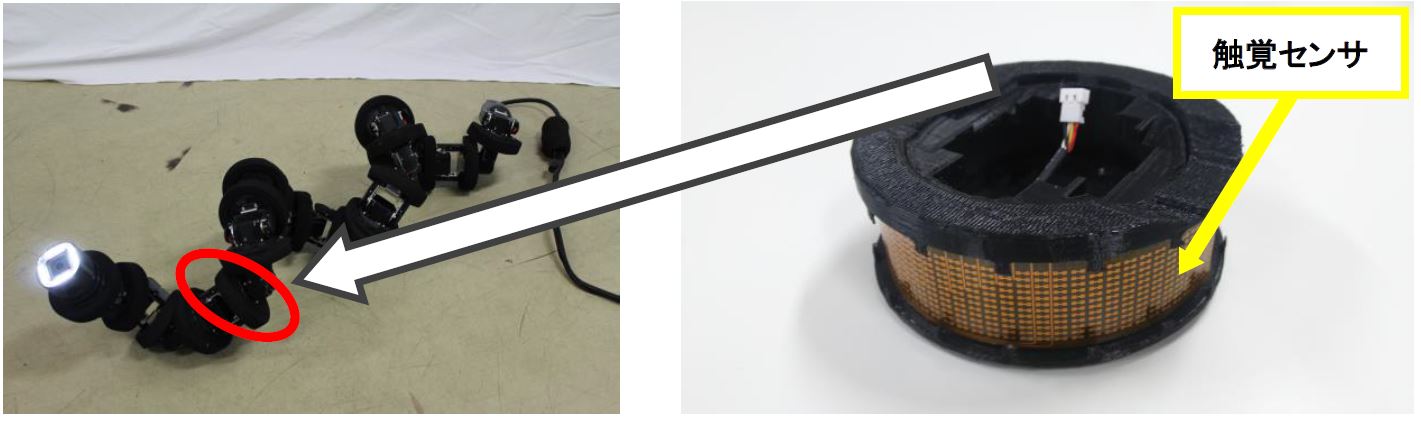
図1 皮膚型の触覚センサを搭載したヘビ型ロボット
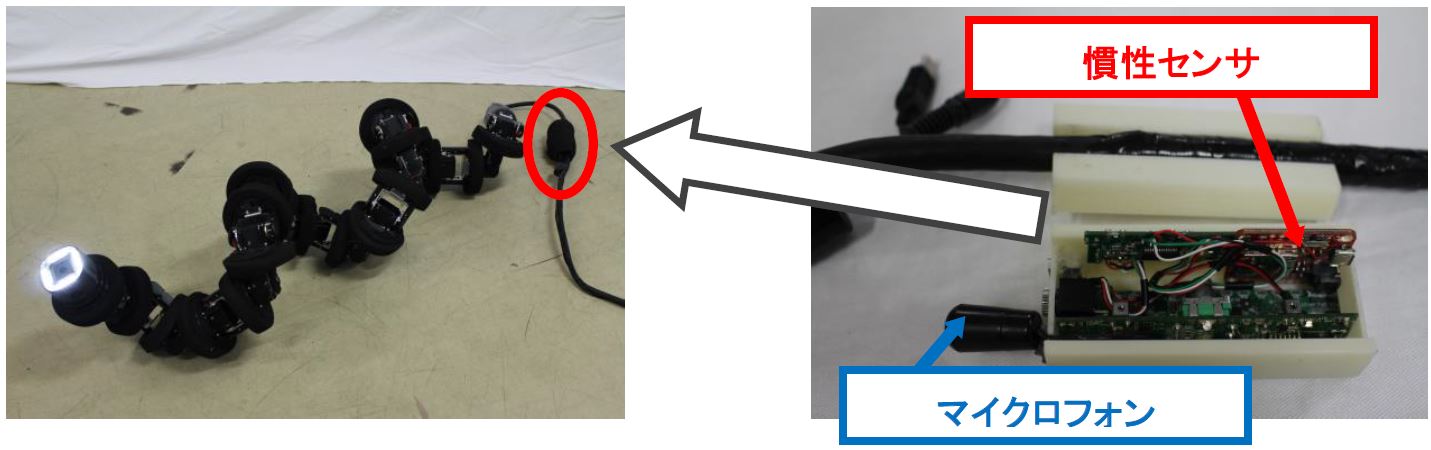
図2 マイクロフォンと慣性センサを搭載したヘビ型ロボット

図3 水平管から曲管を経て垂直管の内側を走破するヘビ型ロボット
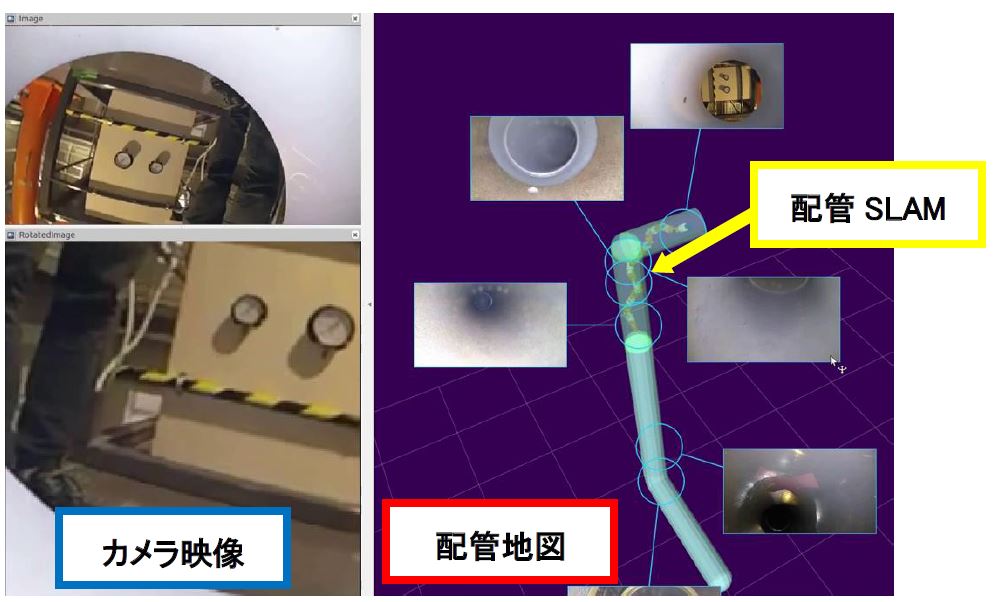 図4 配管内点検用遠隔操作インタフェース
図4 配管内点検用遠隔操作インタフェース<詳しい研究内容について>
複雑な配管内の情報を正確な地図として自動生成するヘビ型ロボットを開発
―ImPACTタフ・ロボティクス・チャレンジによる
タフなヘビ型ロボットの開発―
<お問い合わせ>
岡山大学大学院自然科学研究科
講師 亀川 哲志
(電話番号)086-251-8023