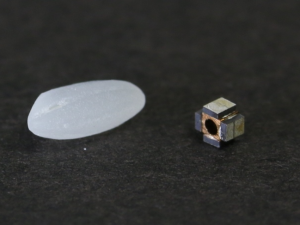
Ultrasonic motors are known as an actuator with high-torque density that is high torque capability in a small volume and can drive at a high torque at low speed without a reduction gear. This characteristic miniaturizes itself to micrometer of millimeter scale. We are building a micro ultrasonic motor by researching machining and manipulation technologies. Until now, we have presented a micro-ultrasonic motor having a stator with a volume of one cubic millimeter.

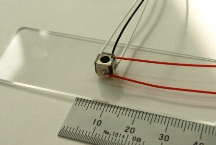
Soft actuators, wihch are inspired by natural muscle, have many potential advantages such as resistance to mechanical damage and inherent compliance. However, their deployment have been restricted by the lack of a soft electrically driven motor that can generate large stroke. We have developed a flexible ultrasonic motor, which is a class of piezoelectric actuator. This motor with an elastic coil spring slider can rotate and translate the slider. Also, the translation stroke (travelling distance) is designed to be almost the same as the length of the coil spring.

Spherical Ultrasonic Motor (SUSM) is an actuator with omnidirectional DOFs in a compact body. It is composed of three annular piezoelectric actuators and a spherical rotor of 20 mm in diameter. It can rotate like eyes, a wrist, and a shoulder in human body.
A miniature piezoelectric mixer that generates the rotational flow of liquid inside a hole of a few millimeters in diameter by the rotation of a sound field (acoustic streaming). The advantage of this mixer is its small size in which a drop of water can be rotated. Such technology is useful to automate much of mixing process such as mixing a few drops of blood by hand in a medical test.
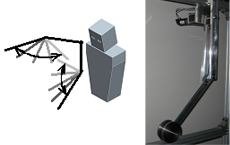
A singularity has been avoided in robotics because it loses degree of freedom of robot arms. However, we focus the interesting dynamic characteristics of the singularity. Singularity Link Mechanism (SLM) performs high responsiveness, high torque, and high energy efficiency. This mechanism is very suited for a lifting task in humanoids and exoskeletons.
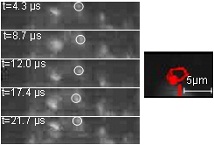
Elliptical Motion Analysis of an Ultrasonic Motor
Observing an elliptical motion of ultrasonic motors is difficult due to the fact that the amplitude is very small (few microns) and the frequency is very high (ultrasonic range over 20 kHz). In this research, we use a high-speed camera with a microscope to clarify the characteristics of the elliptical motion. The goal of this research is to the development of an ultrasonic motor with light-weight and high-torque by using clarified characteristics.