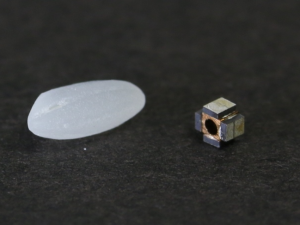
超音波モータの小型化と高性能化について、小さいものの加工法やアセンブリ技術を含め、研究しています。 現在までに、約1mmのモータで、約40μNmのトルクを発生することに成功していますが、このサイズでこれほどのトルクを出せるモータは世界的にも他にありません。他にも、ほとんど目には見えないサイズの超小型モータや、直進運動を生み出すリニア型超音波モータなどの研究を行っています。
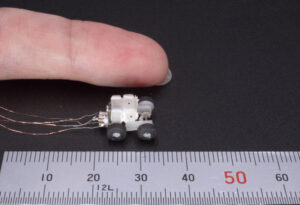
開発したマイクロモータを用いて、マイクロロボットの開発を行っています。マイクロ超音波モータの出力をマイクロギアで増幅して力が出るようにした超小型の車輪型ロボットや、昆虫サイズの歩行型移動ロボット、蝶のサイズのはばたき飛行ロボットなどの開発を行っています。また、手術用ロボットや内視鏡などへの応用を目指したマイクロロボットに関する研究も行っています。

球面超音波モータは、手首や肩のような3自由度の回転が得られるアクチュエータです。一つの球を自由に回すことができ、回転3自由度、高精度、高応答といった特長があります。最近では、簡単な構造で、直径が約5mmの球を回すことのできる新しい球面モータの開発に取り組んでいます。ならびにそれを応用した、数ミリの超小型カメラやセンサの方向制御、マイクロマニピュレータなどの研究を行っています。

この研究では、超音波モータの出力軸に柔らかいコイルばねを用いることで、全く新しいソフトアクチュエータの開発を行っています。従来の空気や熱で動作するアクチュエータに比べ、1-2桁ほど高い応答性や位置決め精度を示し、また回転動作と直動動作を同時に発生できるユニークな特徴を持っています。さらに、上記のマイクロモータと同様の構造を有しており、数mmサイズまで小型化が見込まれます。

筋電義手
事故や病気などで腕を失われた上肢切断者に対する支援として筋収縮に応じて発生する筋電位を用いた筋電義手を開発しています.提案義手は日常生活での利用を想定し,切断肢と健常肢との協調作業を可能としています.現在は義手に触覚を与える研究も行っています.
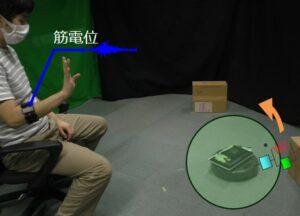
多層非接触インピーダンスモデルに基づく移動ロボット
肢体不自由者が自立して生活を営むことを考えると移動のサポートが必要不可欠です.本研究ではロボット周囲に仮想的な壁を作り出し,生体信号制御型移動ロボットの自然な衝突回避法について研究を進めています.

生体信号制御型環境制御装置
肢体不自由者の自立生活支援のため,筋電位や音声・脳波信号などの生体信号を用いて制御可能な環境制御装置を提案しています.提案システムは身体動作を伴わずに操作することも可能で,体が全く動かない方が自らの意思による機器制御を実現できます.

生体信号インタフェースのためのトレーニングシステム
生体信号を制御入力とする機器は使用者の操作スキルによって取り扱いが難しい場合があるため,使用者の能力を学習して能力に合わせた操作訓練が可能なシステムを提案しています.Virtual Reality技術によるさまざまな状況に応じた訓練が可能です.
過去の研究
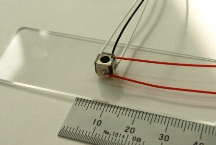
直方体形状に開けられた穴の中に,進行波(音響流)を発生させ,中に入っている液体を自由に回転させて撹拌することができるミキサーの開発を行っています.小さくできるというのが一つの特長であり,1滴程度の液体(水だと約0.03ml)でも回転させることが可能です.この技術は,微量のサンプルを撹拌する必要のある生体分析や化学分析などでの応用が期待されます.
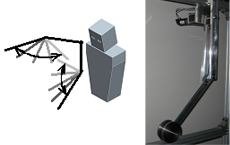
特異姿勢はロボットの操作において避けられてきた姿勢ですが,我々は,その特異点のもつ動力学的長所に注目し,研究をしています. 左の写真のような特異点リンク機構は,一般的なシリアルリンク機構と比べ,高応答性,高トルク,そして高効率という特長を,実験で証明しています. この機構は,ロボットアームや,ロボットスーツに適していると考えています.
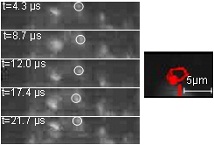
超音波モータの駆動原理である楕円運動は,超高速(数十kHz),超微小(数μm)であるがゆえに詳しく調べることが困難でした.本研究では,高速度カメラに顕微鏡を使った装置を用いて,その楕円運動の観察を行っています.この研究成果に基づいて,超音波モータの軽量高トルク化設計や,トルク制御を実現することを目的としています.